光线追踪
光栅化存在的问题
使用光栅化的存在的一些缺陷:不能好的表示全局的效果。
- 无法很好的做
软阴影(后面改进才可以的,耗性能)。 - 无法很好的做
光泽反射。 - 无法很好的做
间接光照(多次反射)。
光线追踪存在的问题
- 光线追踪是准确的、质量高的,效果非常好,但非常慢,非常耗性能。
光线追踪更多的应用是
离线应用。~10K CPU核心小时,在生产中渲染一帧。
光线是什么?
- 光以直线传播(尽管这是错误的,它是一种波,这说它是直线也没什么问题)。
- 如果光线交叉,它们就不会相互“碰撞”(尽管这仍然是错误的)。
- 光线从光源传播到眼睛。(经过各种曲折的弹射过程,但是物理学在路径反转下是不变的----拥有可逆性)。
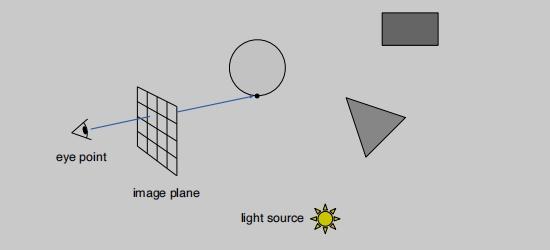
如何做光线追踪?
利用的就是光线路径的可逆性。 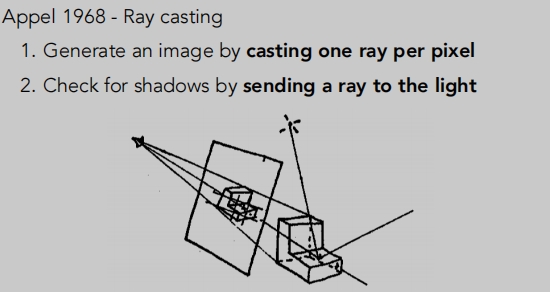 首先是要做光线的投射:
首先是要做光线的投射:
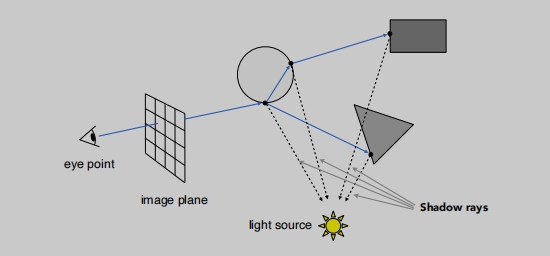
假设我们往一个虚拟的世界看,有一个成像的平面,被分割为很多的像素格子。
从相机出发,到达某一个像素点,连一条线。
然后把这个点与光源进行连线,这里是为了判断这个点是不是对于光源也可见,如果不在阴影里,那么我们就获得一条有效的光路(光源 --> 物体 --> 相机)。
有了光路我就可以计算这条光路的能量,从而计算像素点的颜色,再进行着色。
在做光线追踪时存在一些假设:
- 眼睛永远为一个针孔摄像机。(是一个点,暂时不考虑实际相机怎么处理)
- 光源也假设是个点光源。
- 对于物体遇到光线后,也假设会发生完美的折射或反射。
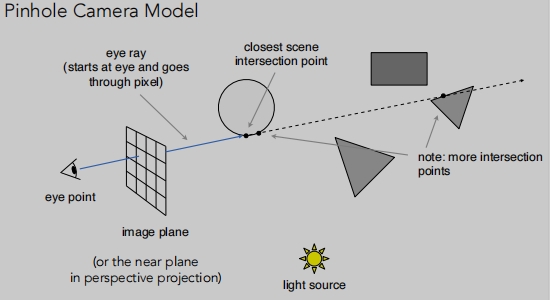
眼睛发出一条直线,相交于最近的点。
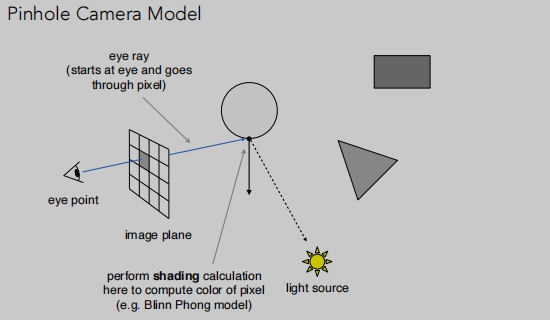
连线眼睛(相机) --> 物体 --> 光源,知道入射方向、折射方向、法线等信息,我们就计算像素点的颜色进行着色(例如Blinn Phong模型)
上面描述的其实还是光线只弹射一次,下面开始 递归式(抖动式)光线追踪。
递归式光线追踪(Whitted-Style)
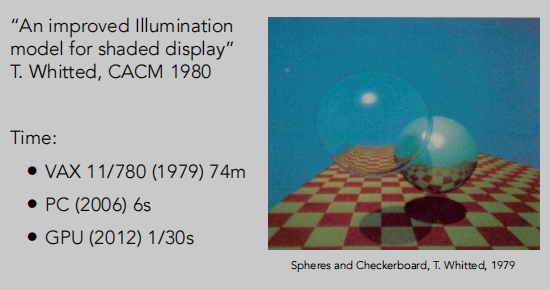 上图不同年代花费的渲染时间:
上图不同年代花费的渲染时间:
1979 -- 74m
2006 -- 6s
2012 -- 1/30s
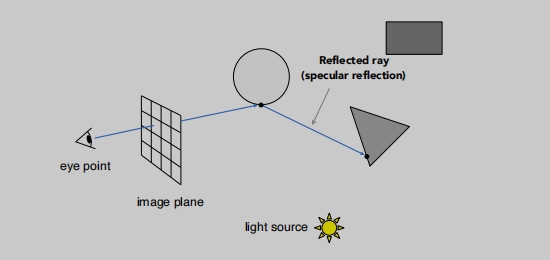
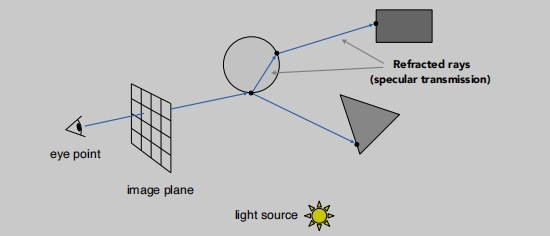
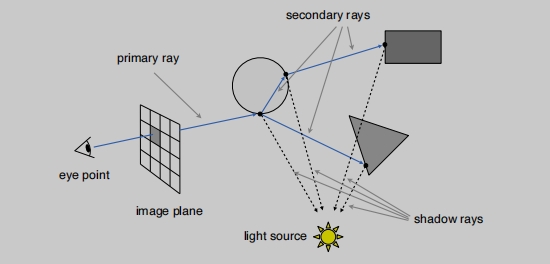
折射和反射的时候都会发生能量的损失。
Whitted风格的像素颜色计算 会把一个点的多个计算结果加起来。
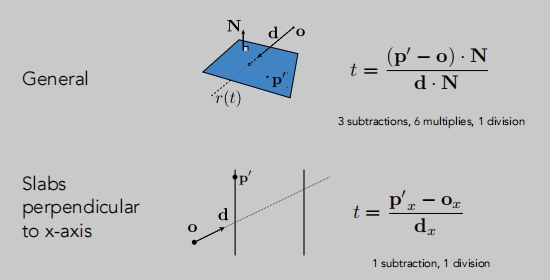
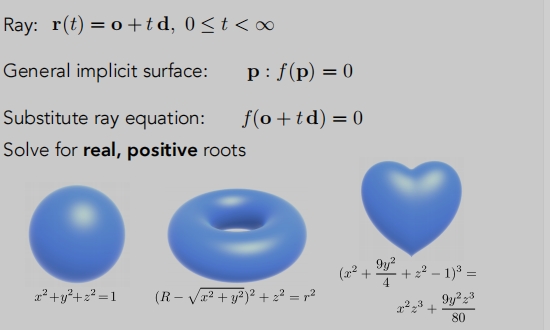
定义光线
光线是由它的原点和一个方向向量来定义的。 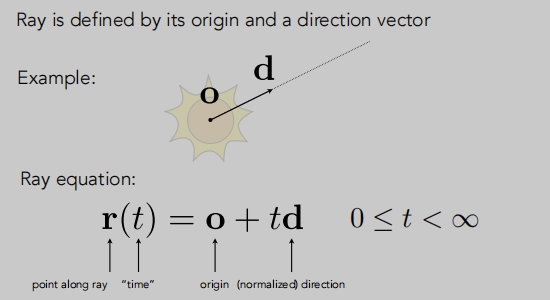
从o 开始 往 d 方向 经过 t 时间。r(t) = o + t d
这里相当于定义一条射线。
光线与球体的交点
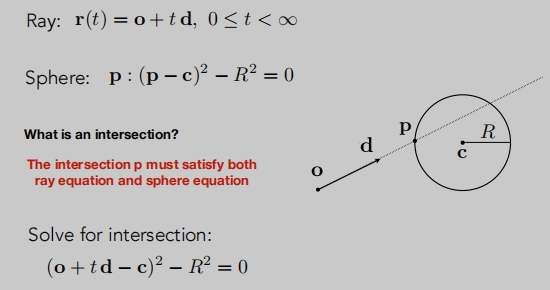
光线:r(t) = o + t d, 0 <= t < ∞
球体:p : (p − c)2 − R2 = 0;这里是隐式定义:求上的任意点p到圆心的距离c = 半径R
如何表示他们的交点呢?这个交点应该是既在射线上也在球的表面上:(o + t d − c)2 − R2 = 0
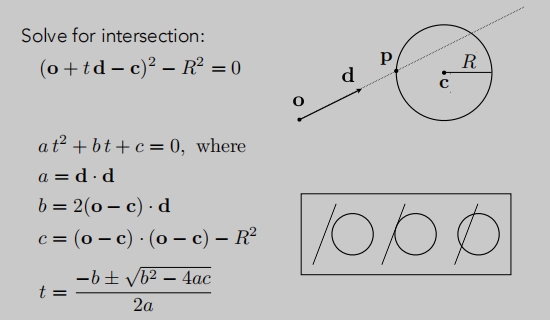
计算 t
光线与一般性的隐式表面交点(推广)
光线与显示表面求交点
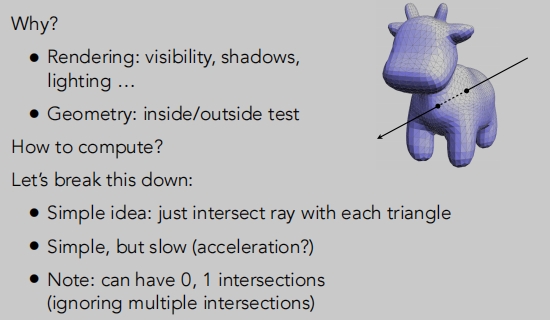
一个简单的想法:只需把光线与每个三角形相交。简单,但缓慢(如何加速?---后面讲的
包围盒)可以有0或1个交叉点。
如何做三角形与光线求交? 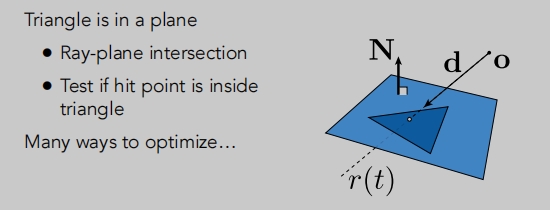
三角形与光线求交点其实就是:光线与一个平面求交点。
我们需要先定义一个平面。
定义平面
平面可以由法向量和平面上的一个点来定义。 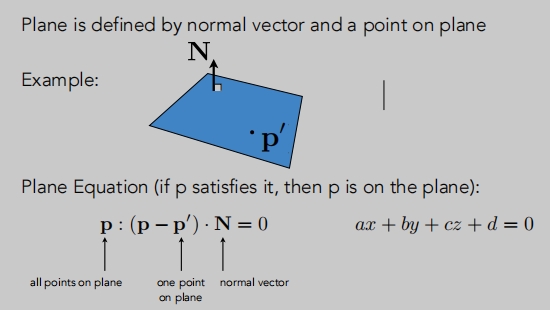
定义一个平面的法线向量(这里只能知道这个平面的朝向,它可以向着朝向移动,无法知道是哪一个平面)
还行需要定义个一点。(这个平面必须经过某一个点)
这样就能由
法向量和平面任意一个点定义出一个平面。
光线与平面的交点
同样的思想:交点既在平面上,也在光线上。 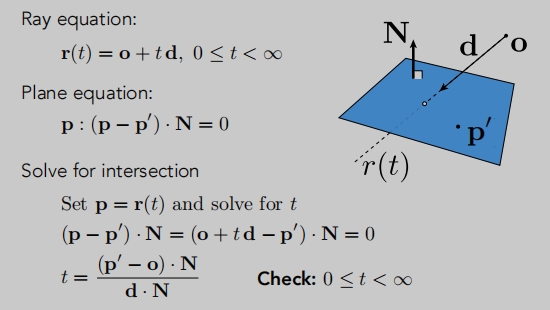
Möller-Trumbore算法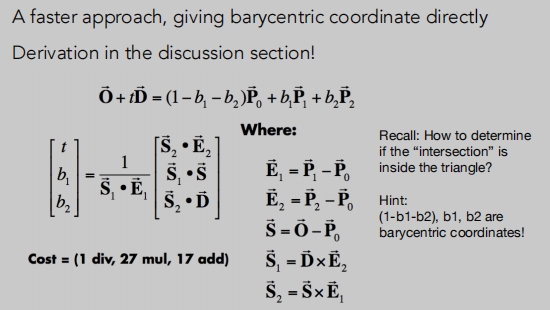
包围盒加速(AABB轴对齐包围盒)
如果光线不能与它的包围盒相交,则肯定无法与物体本身相交。 
AABB轴对齐包围盒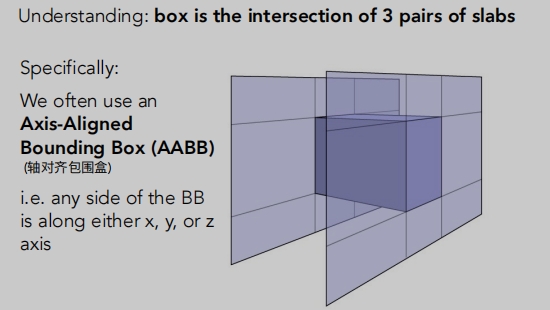
如何判断光线与包围相交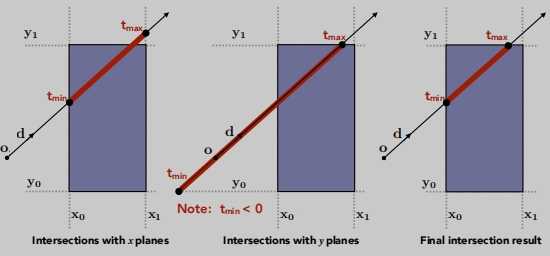
- 只有当光线进入所有的对面,光线才会进入盒子。
- 只要光线离开任何一对面,光线就会离开盒子。
- 对于每一对面,各计算一次tmin和tmax(负数是可以的)。
- 计算出tmin和tmax,进入的时间求最大值,离开的时间求最小值。
tmin、tmax正负号情况: 应该检查t是否是负的物理正确性:因为光线并不是一条线,而是射线。 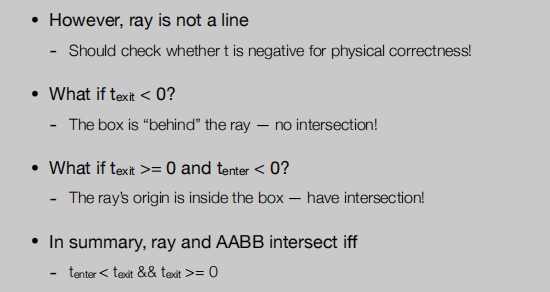
离开的时间< 0 , 这个盒子就在射线的“后面”,不存在交点
进入的时间< 0 ,离开的时间> 0 ,光线的原点在盒子里,有交叉点!
进入的时间<离开的时间&&进入的时间>= 0 ,说明 光线在盒子里有段时间,有交叉点。
为什么使用包围盒?