三维图形变换
三维空间变换
矩阵表示: 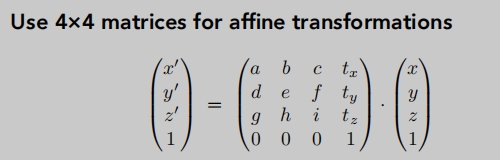
缩放变换、平移变换矩阵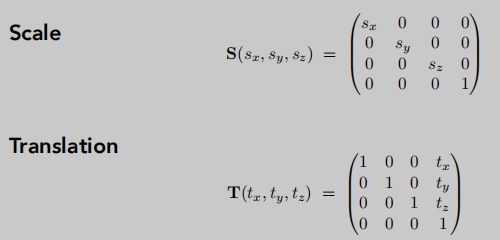
旋转变换矩阵(三维空间中最复杂的变换) 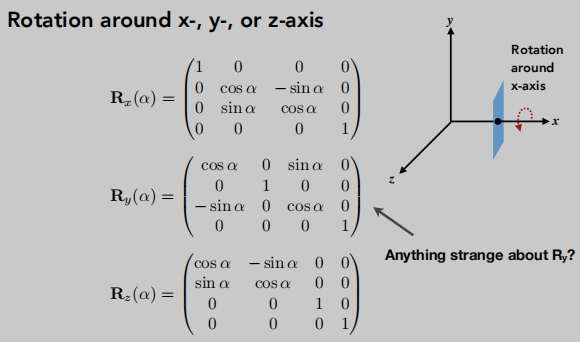
任意角的旋转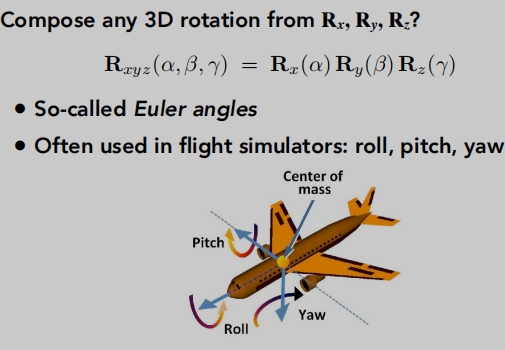
罗德里格斯的旋转公式
旋转轴默认过远点
对任意旋转变换,给出一个旋转矩阵。
当我们想要围绕某一个点旋转
先将这个移到原点。
在进行旋转。
在将所有的变换恢复到原来的点。
罗德里格斯的旋转公式推导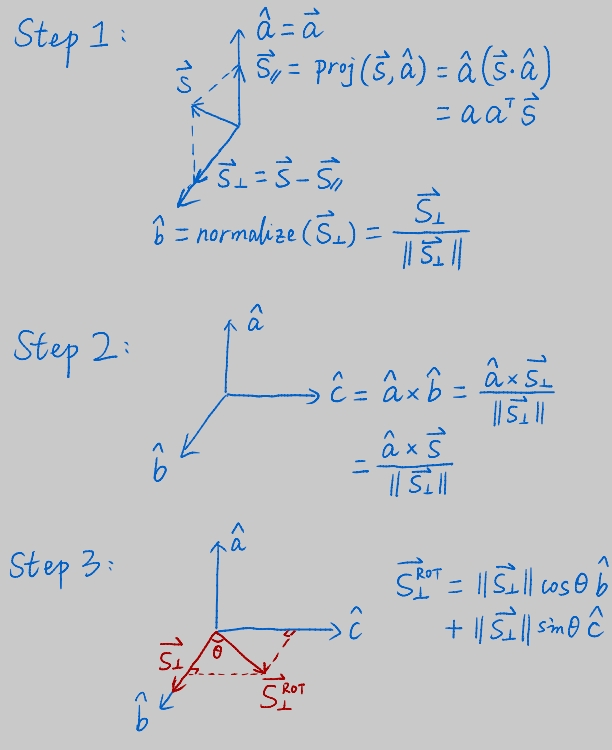
四元数 用于旋转与旋转的差值计算。(旋转矩阵不适合做差值计算)
三维变换
- 视图变换
- 投影变换
- 正交投影
- 透视投影
什么是视图变换?
拍一张照片的流程
- 布置好拍照场景,人和物(
modeltransformation) - 找一个角度,布置相机的位置(
viewtransformation) - 拍照!(
projectiontransformation)
模型变换-视图变换-投影变换
视图变换/相机
定义相机
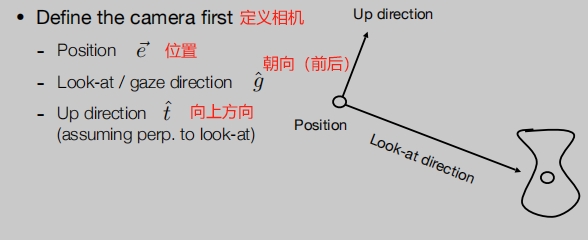
约定相机的初始位置
- 原点:(0,0,0)
- 朝向:-Z
- 向上方向:Y
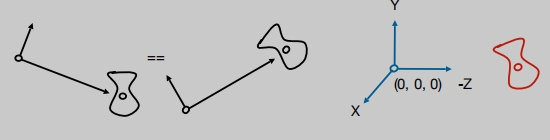
如何初始化相机的初始位置? 一 一对应 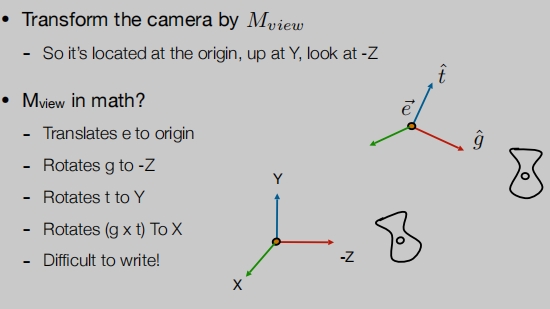
相机初始化写成矩阵的行式(先平移再旋转) 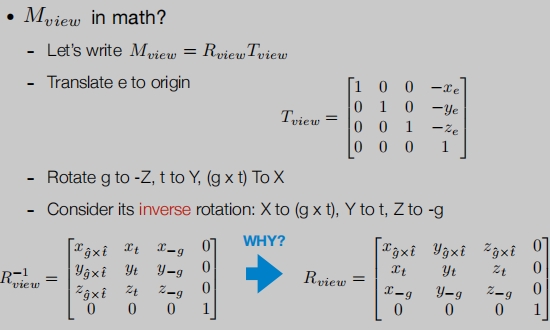
视图变换:相机为了设置为一个约定位置,其他所有的物体也要跟着变换,保证相机与物体保持不变。
视图变换操作的是相机,物体模型要跟着变换,做相对运动。
模型变换与视图变换经常在一起,被称为
模型视图变换。
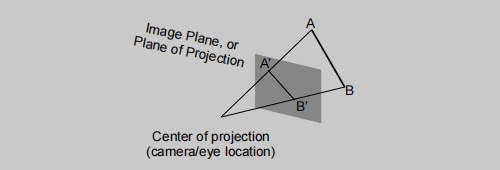
投影变换
- 3D 到 2D
- 正交投影
- 透视投影
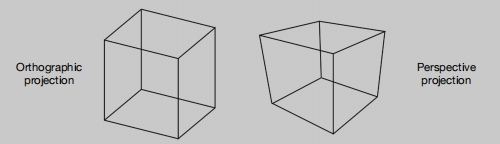
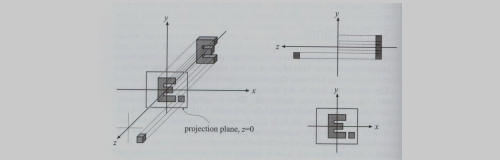
正交投影
一种简单的做法是:
相机位于原点,看着-Z,Y向上。
Z 降维。
变换生成的矩形扩展为二维矩阵。
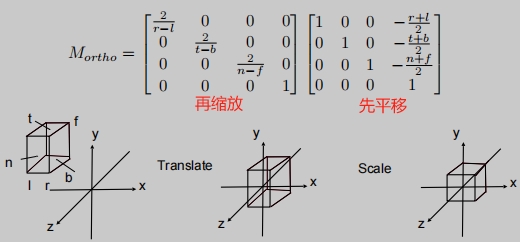
还有一种标准的做法是:
把一个长方体映射到“典型的(正则、规范、标准)”立方体。
通过转换中心长方体。
通过转换中心长方体。
先平移(中心到原点),后缩放(长度/宽度/高度到2)
为什么是2,因为是从中心原点向正负坐标各延申1个单位长度。
因为我们是沿着-Z方向看,所以
n > f。这与左/右定则有关。
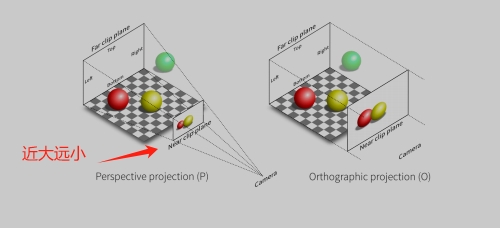
透视投影
- 最常见的是计算机图形学,艺术,视觉系统。
- 满足近大远小。
- 平行的直线将不再平行,收敛于单点。
回顾齐次坐标:
(x、y、z、1)、(kx、ky、kz、k != 0)、(xz、yz、z2、z != 0)在3D中都表示同一点(x、y、z)
透视投影分为两步:
- 先像远平面挤压到近平面。
- 再进行正交投影。
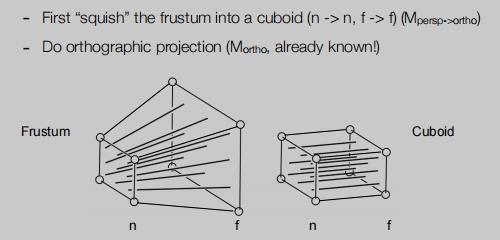
挤压步骤:
近平面不变。
远平面Z 值不变,只是向近平面收缩。
远平面的中心点不变。
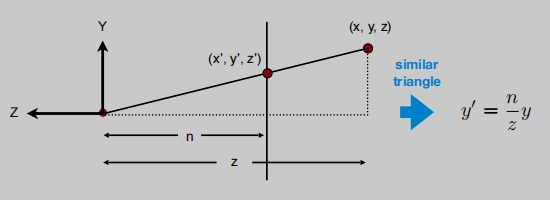
这描述的是Y,X是同样的道理。

挤压用齐次坐标表示: 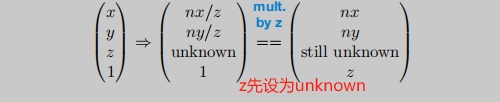
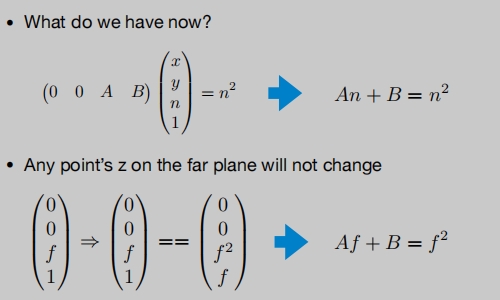
求变换矩阵: 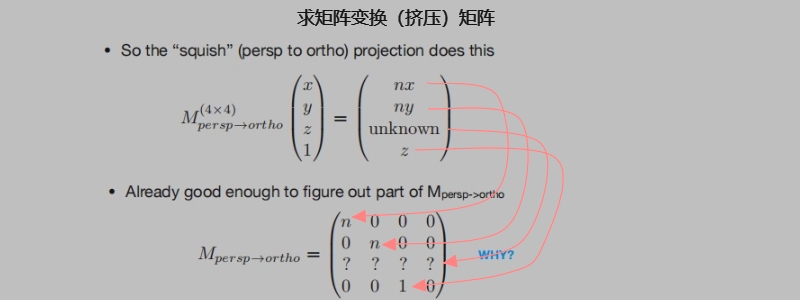
变换矩阵的第三如何求呢?观察挤压步骤发现:
①、近平面上的任何一个点都不会改变。
②、远平面上的任何一个点的z都不会改变。
③、远平面的中心点不变。
根据上面①、② 可以得到变换矩阵的第三行前面两个:(0 0 A B) 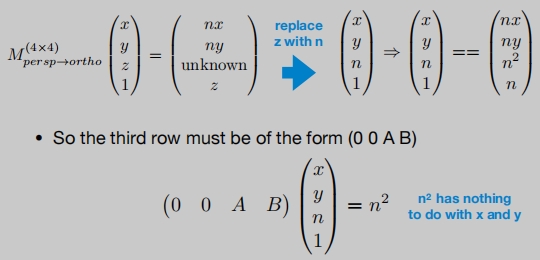
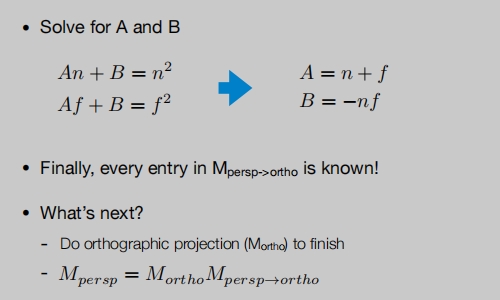
再根据 ③ 可以求出A 和 B