光栅化阴影
如何使用栅格化来绘制阴影?
阴影映射(Shadow mapping)
着色是一种局部的现象,着色的时候只考虑,光源、着色点自己(物体本身)、摄像机。这其实是不正确的,因为会存在其他物体遮挡在着色点和光源之间,这个时候着色是无法解决阴影的存在,Shadow mapping就是用来解决这一问题,并且限制在光栅化中。
Shadow mapping 是一种图像空间算法
- 在阴影计算过程中,不需要知道场景的几何形状。
- 同样也存在走样现象。
- 经典的
Shadow mapping只能处理点光源。
Shadow mapping 的核心思想:
如果有一个点,它不在阴影里,你又能看到这个点,说明:摄像机能看到这个点,光源也能看到这个点(硬阴影)。
点光源下如何生成阴影?
第一步: 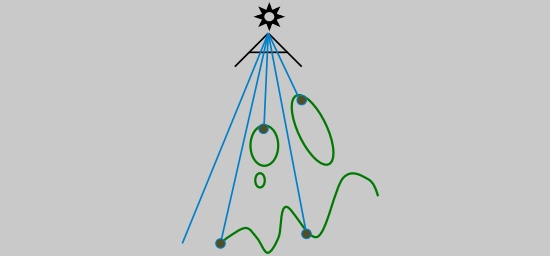
从光源看向场景/物体,记录当前得到场景/物体对应的深度(Z-Buffer),光源深度缓冲图。
第二步: 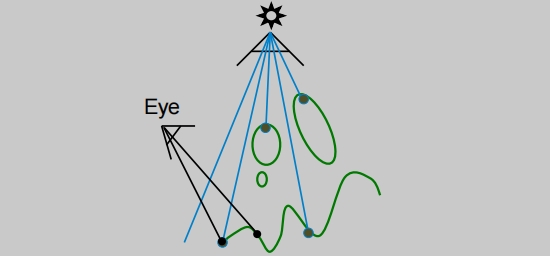
从定义的相机看向场景。
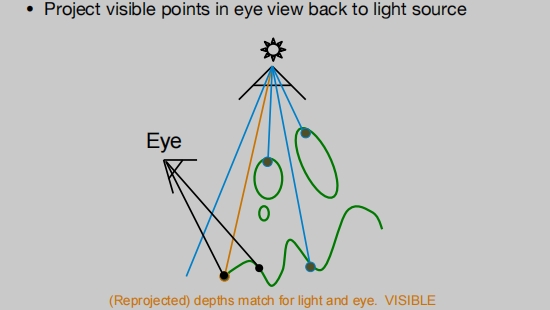
橙色线条对应的点:投影回点光源深度缓冲图对应的像素位置深度距离。
然后计算橙色线条对应的点实际到点光源的深度距离。
进行比对(结果是一致的,证明摄像机能看到这个点,光源也能看到这个点--可见的)。
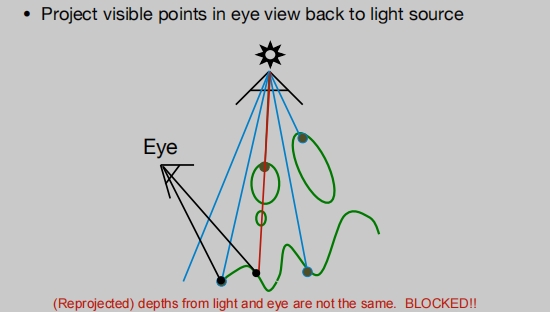
红色线条对应的点:投影回点光源深度缓冲图对应的像素位置深度距离。
然后计算红色线条对应的点实际到点光源的深度距离。
进行比对(结果不一样--存在阴影)。
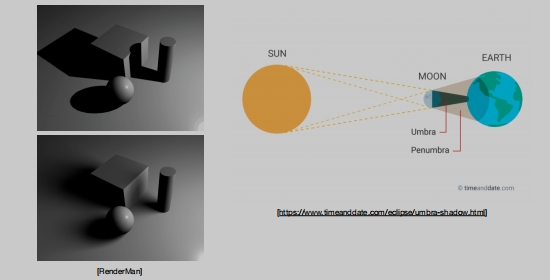
Shadow mapping 应用示例
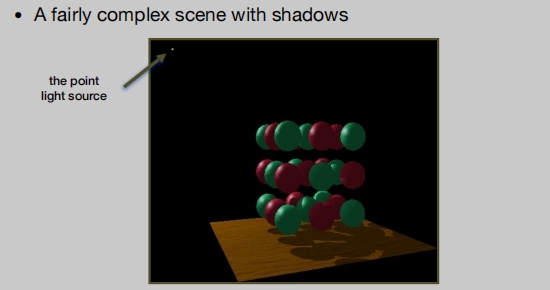
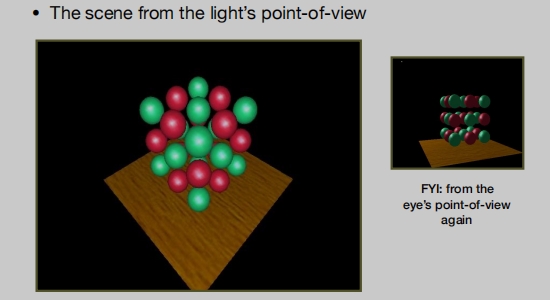
图左:从光线的角度来看,这个场景。
图右:从眼睛(像机)的角度来看。
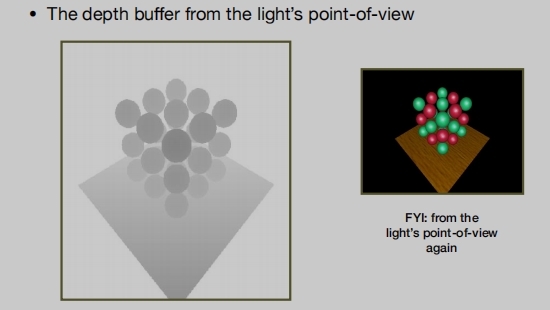
记录从光的角度来看,深度缓冲图(Shadow map)。

绿色是阴影贴图上的距离(灯光、阴影点)≈ 深度。
非绿色是阴影应该出现的地方。(该区域投影回点光源的深度的实际距离 与 点光源深度缓冲图记录的深度距离 比对得出)
Shadow mapping存在的一些问题
- 由于数值(浮点数)存在的精度问题(比对 深度缓冲图时)。
- Shadow map 自身分辨率。
- 只能做硬阴影。
Shadow mapping 虽然存在一些问题,但任然是工业界的主流技术。
硬阴影与软阴影