光栅化的可见性/闭塞性
可见性/闭塞性
- 使用深度缓存/缓冲
画家的算法
- 其灵感来自于画家的绘画方式。
- 先远后近,近的图形可以覆盖远图形的。(顺序很重要)
- 需要进行深度排序(n个三角形的O(nlogn))
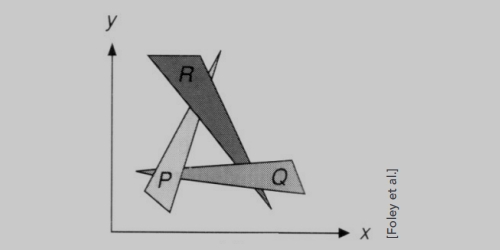
而出现这种复杂的情况时(环),实际做法中种画家算法就无法适应了(无法定义他们的深度关系)。因此出现了
Z-Buffer算法
Z-Buffer(深度缓存/缓冲算法)
- 无法对三角形的深度关系定义,但可以对每
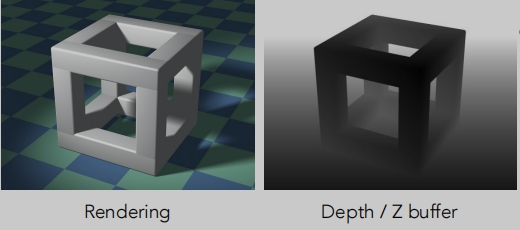
一个像素的顺序进行排序。 - 用一个额外的缓冲区来存储深度值:
frame buffer: 当前的场景信息(最后的结果)。
depth buffer: 当前场景每个像素的深度。
TIP
为简单起见,我们假设z(深度)总是正的:它就是物体到相机的距离,越小的距离表示越近,越大的距离表示越远。
Z-Buffer 算法
初始化深度缓冲器为∞,栅格化期间: 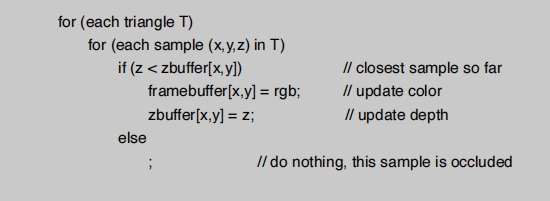
示例 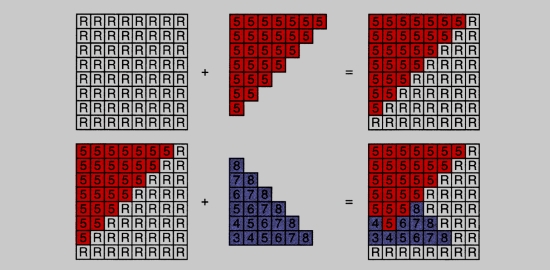
惰性覆盖:当深度缓存相同时,不会覆盖,沿用已有的深度。
Z-Buffer 算法复杂度
- n个三角形的O(n)(假设覆盖范围不变)
- 它有一个非常好的性质,它与顺序是没有关系的。