什么是图
【示例】
六度空间理论:你和任何一个不相识的陌生人之间相隔的人数不会超过六个。
村村通: 
⭐⭐⭐ 重要 ⭐⭐⭐
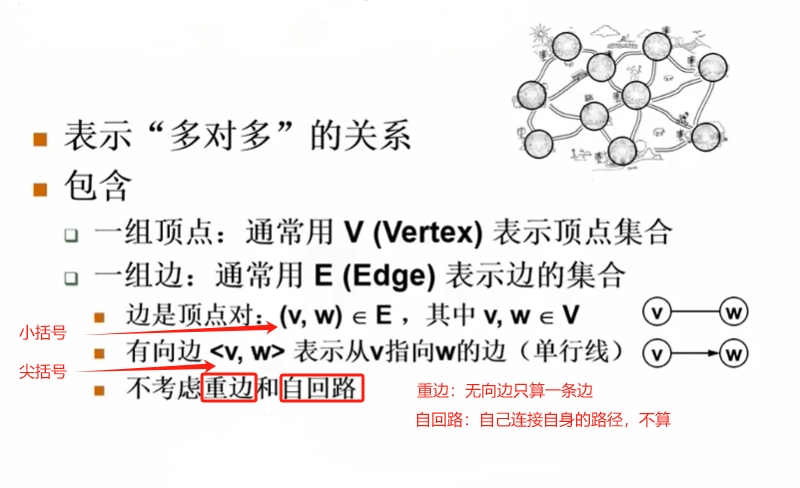
线性表是一对一的关系,树是一对多的关系,而图则表示多对多的关系。线性表、树 是图的特殊情况。
抽象数据类型描述
- 类型名称:图(Graph);
- 数据对象集:G(V,E)由
一个非空的有限顶点集合 V和一个有限边集合 E组成; - 操作集:对于任意图 G ∈ Graph,以及 v ∈ V,e ∈ E;
Graph Create():建立并返回空图;
Graph InsertVertex(Graph G, Vertex V):将 V 差入 G(插入顶点);
Graph InsertEdge(Graph G, Edge e):将 e 插入 G (插入边);
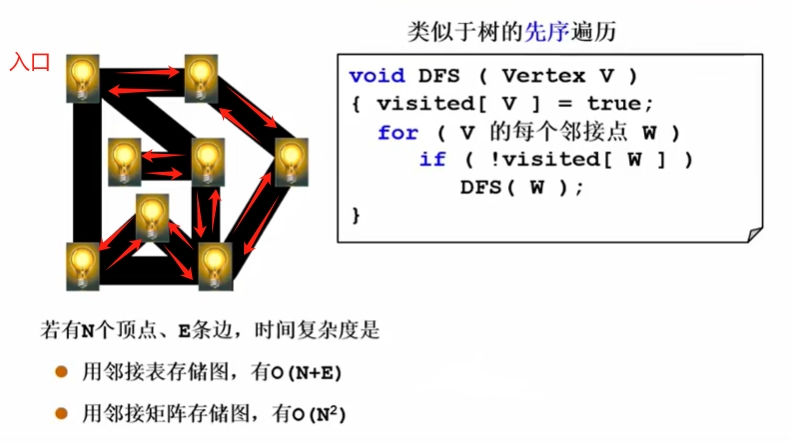
void DFS(Graph G, Vertex V):从顶点v出发深度优先遍历图G;
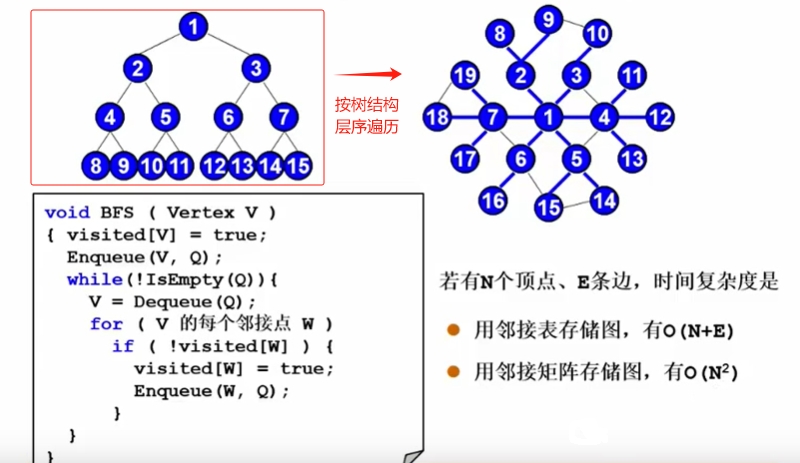
void BFS(Graph G, Vertex V):从顶点v出发广度优先遍历图G;
void ShortestPath(Graph G, Vertex V, int Dist[]):计算图 G 中顶点 v 到任意其他顶点的最短距离;
void MST(Graph G):计算图 G 的最小生成树;
......
图的术语
- 有向图
- 无向图
- 网络
- .......
邻接矩阵【数组表示图】
左边的图 用 矩阵表示 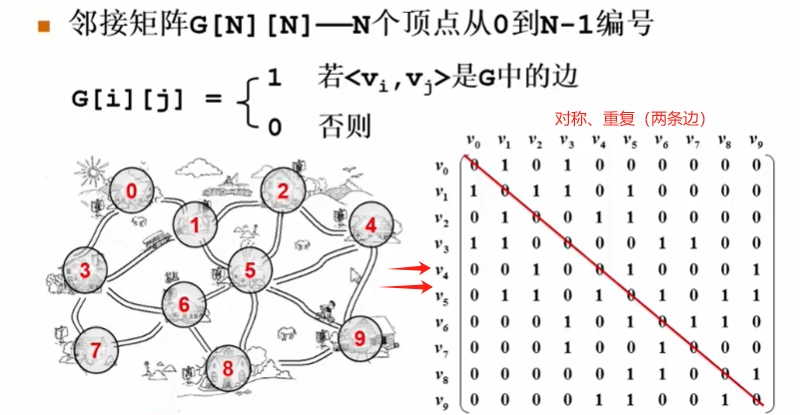
存在的问题:对于无向图的存储,怎么样可以省一半的空间?
解决方法:如图 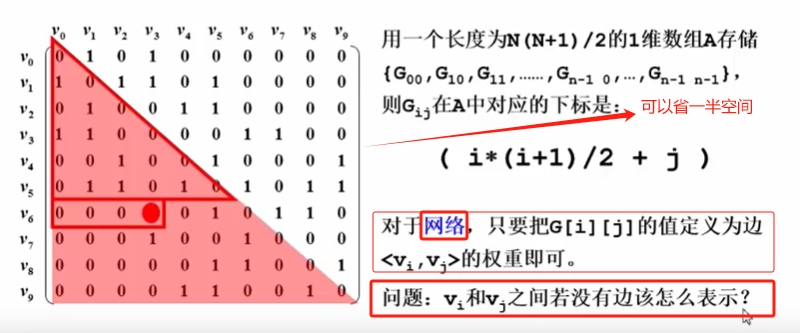
邻接矩阵优点:
- 直观、简单、好理解;
- 方便检查任意一对顶点间是否存在边;
- 方便找任一顶点的所有“邻接点”(有边直接相连的顶点);
- 方便计算任一顶点“度”(从该点发出的边数为“出度”,指向该点的边数为“入度”);
无向图:对应行(或列),非0元素的个数;
有向图:对应行非0元素的个数是“出度”,对应列非0元素的个数是“入度”;
邻接矩阵缺点:
- 浪费空间:对稠密图(完全图)还是很合算的 ,对于稀疏图(点多 边少)有大量无效元素;
- 浪费时间:统计稀疏图中一共有多少条边(需要扫描一遍系数图);
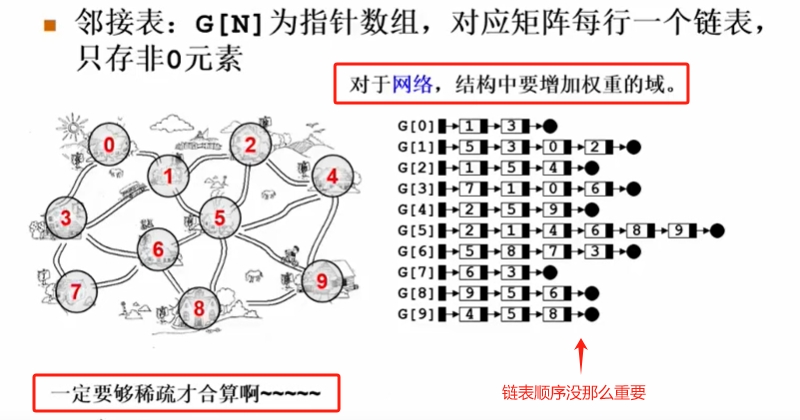
邻阶接表【链表表示图】
 邻接表优点:
邻接表优点:
- 便找任一顶点的所有“邻接点”;
- 节约稀疏图的空间;
需要N个头指针+2E个结点(每个结点至少2个域)
- 计算任一顶点的“度”(无向图)方便; 邻接表缺点:
- 计算任一顶点的“度”(有向图)困难;
对有向图:只能计算“出度”;需要构造“逆邻接表”(存指向自己的边)来方便计算“入度”
- 不方便检查任意一对顶点间是否存在边;
注意
除了邻接矩阵、邻接表,图的表示方式有很多种,如:
- 邻接多重表
- 十字链表
- 边
具体要看解决什么类型的问题。
图的遍历
DFS(深度优先)
BFS(广度优先)
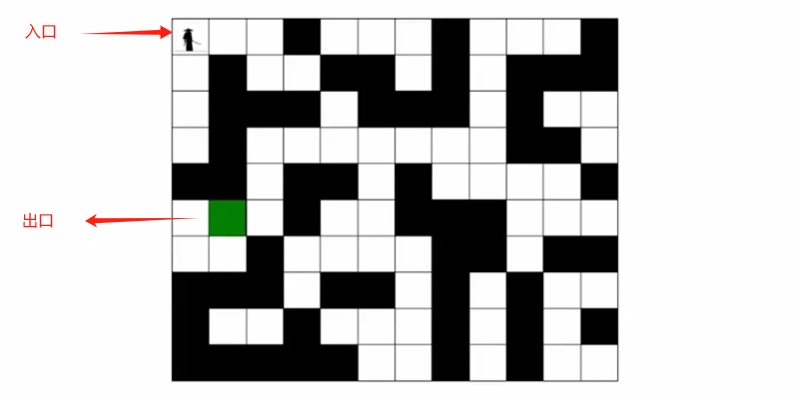
为什么需要这两种遍历方式呢
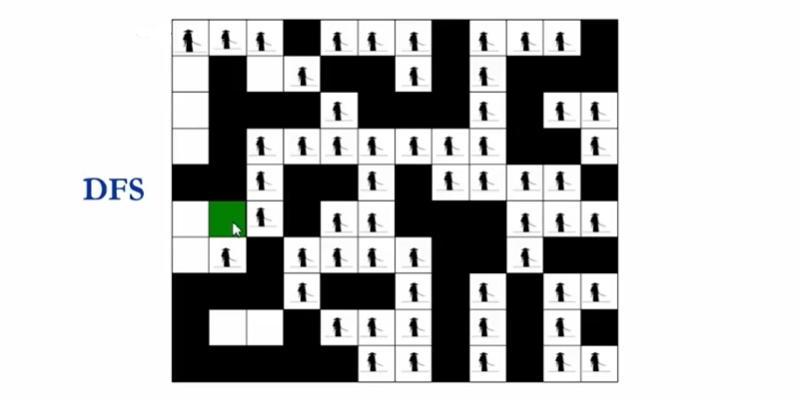
通过下面示例对比了解(走迷宫)
DFS规则:顺时针寻找相邻连接点(当然也可以定其他规则)
| ⑧ | ① | ② |
|---|---|---|
| ⑦ | 🚩 | ③ |
| ⑥ | ⑤ | ④ |
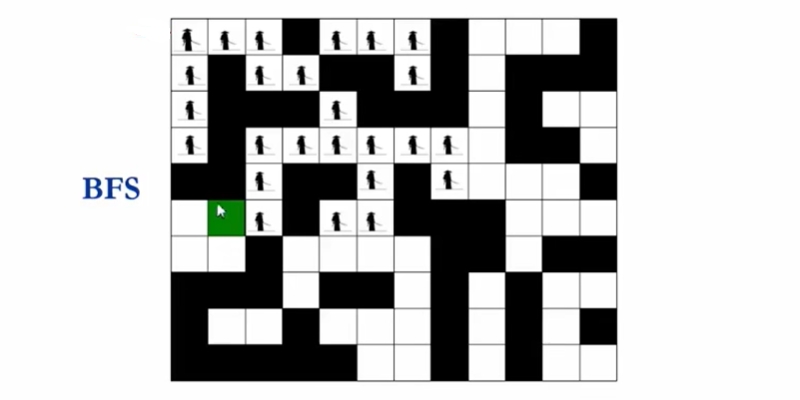
DFS规则: 首先入口进入队列,然后开始把相邻的格子加入队列,一圈一圈的开始遍历搜索。
| ② | ② | ② | ② | ② |
|---|---|---|---|---|
| ② | ① | ① | ① | ② |
| ② | ① | 🚩 | ① | ② |
| ② | ① | ① | ① | ② |
| ② | ② | ② | ② | ② |
图遍历,是从一个结点出发,沿着边的方向,依次访问图中其它各结点,且每个结点仅被访问一次。
图遍历的一些概念
连通:如果从V到W存在一条(无向)路径,则称V和W是连通的;路径:从顶点V到顶点W存在一系列顶点{V,V1,V2...,W}的集合,其中任一对相邻的顶点间都有图中的边相连接的,- 路径长度:是路径中的边数(如果有带权,则是所有边的权重和);
- 如果V到W之间的所有顶点都不同,则称
简单路径,如果有回路就是不是简单路径;
回路:从顶点V到顶点V的一条路径;连通图:图中任意两个顶点钧连通;连通分量:无向图的极大连通子图;- 极大顶点数:再加一个顶点就不连通了;
- 极大边数:包含子图中所有顶点相连的所有边;
示例
强连通:有向图中顶点v和w之间存在双向路径(V-->W,或者W-->V往返的路径不一定是同一条),则称v和W是强连通的;强连通图:有向图中任意两顶点均强连通;- 弱连通图:强连通图边的方向抹掉,就是弱连通图;
强连通分量:有向图的极大强连通子图;
图的算法事例
- 拯救007
- 六度空间
- 哈利波特咒语
- ...
最短路径
生活中从A地点到B地点,花最短时间、花最少的钱 都是图论中的最短路径问题。
最短路径的抽象
在网络中,求两个不同顶点之间的所有路径中,边的权值之和最小的那条路径。
- 这个路径就是两点之间的
最短路径(Shortest Path);- 第一个顶点为
源点(Source);- 最后一个顶点为
终点(Destination);
最短路径问题分类
单源最短路径:从固定的某个源点出发:求其到所有其他顶点的最短路径。
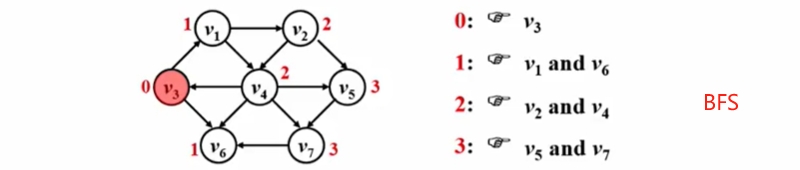
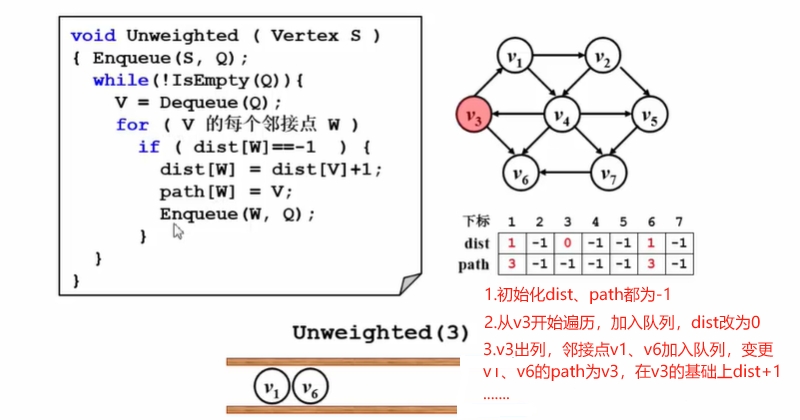
无权图(有向/无向):按照递增(非递减)的顺序找出各个顶点的最短路径;
有权图(有向/无向):按照递增(非递减)避免负线圈 的顺序找出各个顶点的最短路径;Dijkstra算法用于解决这一问题。
Dijkstra算法
- 令S = { 源点s + 已经确定了最短路径的顶点Vi }
- 对于任一未收录的顶点v,定义dist[v]为 s 到 v 的最短路径长度,但该路径仅经过S中的顶点,
即路径 {s →( vi ∈ S) → v }的最小长度( vi ∈ S)是S中的最小路径- 路径按照
递增(非递减)的顺序生成
- 则正真最短路径必须只经过S中的顶点;
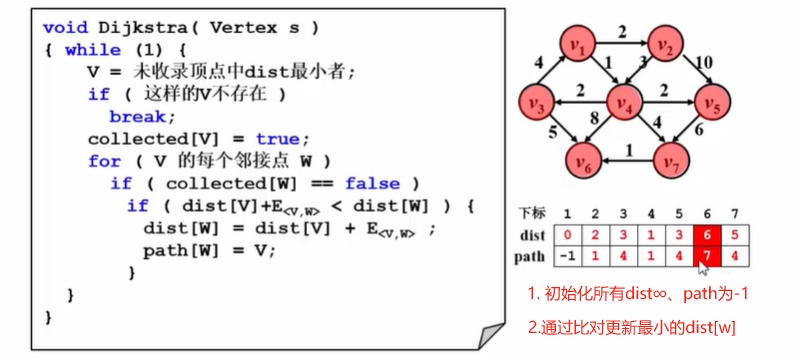
- 每次从未收录的顶点中选一个dist最小的收录(采用
贪心算法策略);- 增加一个v进入S,可能影响另外一个 w 的dist值;dist[w] = min { dist[w] , dist[v] + < v , w >的权重}
Dijkstra算法收录方式:
方法一: 直接扫描所有未收录的顶点 O(|V|),---- 稠密图优势T=O(|v|2 + |E|)
方法二: 将dist存在最小堆中 O(log|V|), ---- 稀疏图优势
更新dist[w]的值 O(log|V|)
T=O(|v|log|V| + |E|log|V|)= O(|E|log|V|)
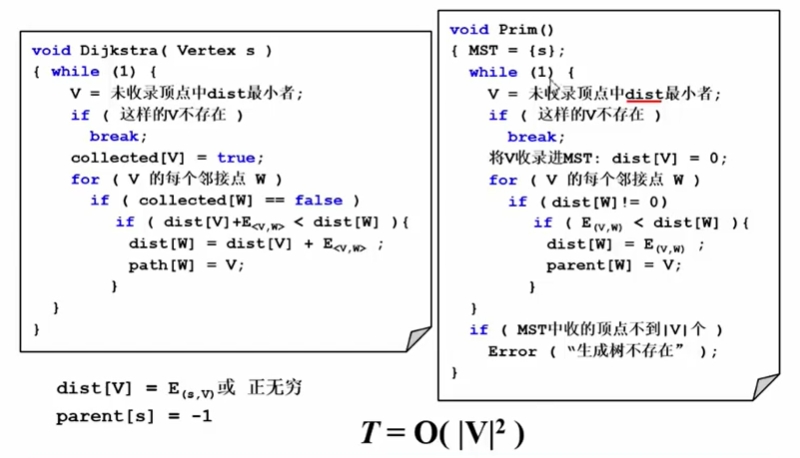
Dijkstra算法实现:
多源最短路径:
方法一:直接将单元最短路径算法调用|V|遍
T=O(|v|3 + |E|*|V|),对于稀疏图比较合算;
方法二:Floyd算法
T=O(|v|3),对于稠密图合算;
Floyd算法
Floyd 算法是一种动态规划算法,基于矩阵运算实现。其思想是通过中间节点逐步优化两个节点之间的距离。首先初始化一个邻接矩阵,其中每一个元素表示两个节点之间的距离,若节点之问没有边,则距离为无穷大。
- 不是很理解,待补充...
最小生成树
是一颗树:
- 无回路;
- |V|个顶点一定有|V|-1条边;
是生成树:
- 包含全部顶点;
- |V|-1条边都在图里;
- 向生成树中任加一条边,都一定构成回路;
边的权重和最小
贪心算法
什么是“贪”:每一步都要最好;
什么是“好”:权重最小的边;
需要约束:
只能用图里有的边
只能正好用掉|V|-1条边
不能有回路
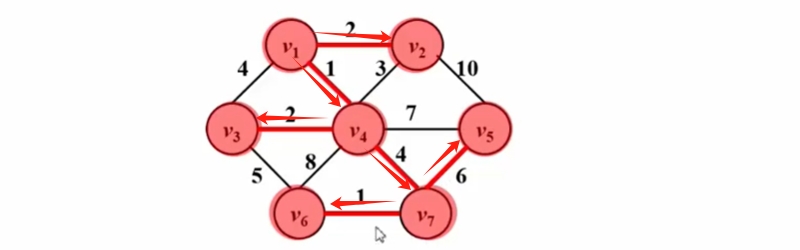
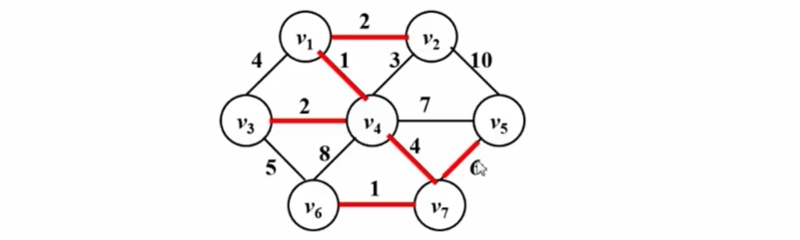
Prim算法(生成最小生成树)
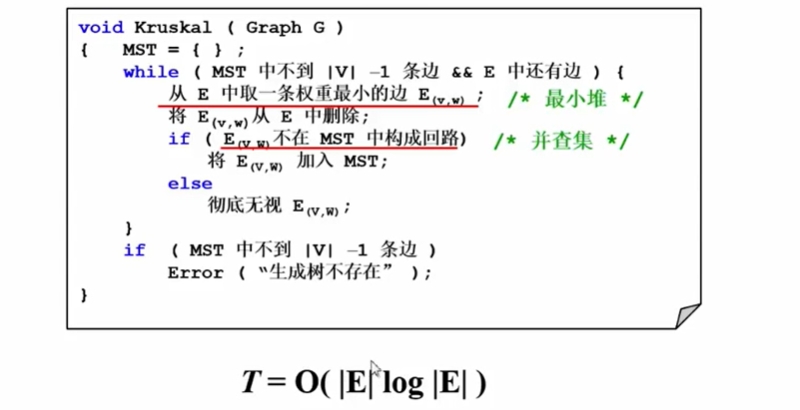
Kruskal算法 (将森林合并成树)
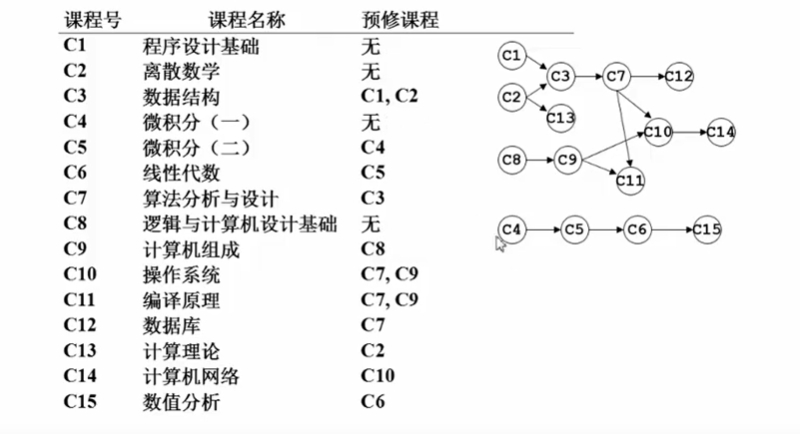
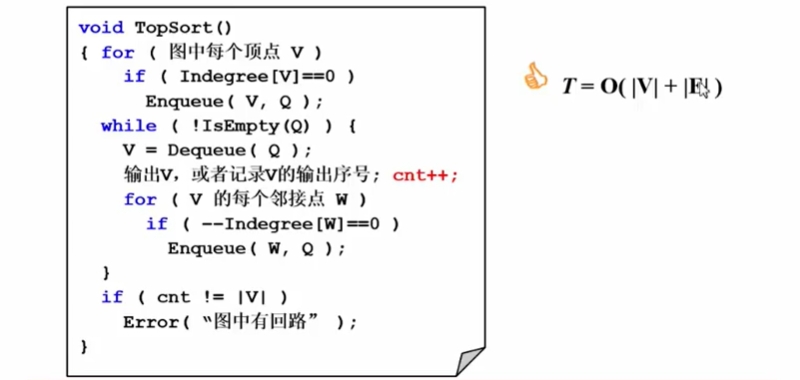
拓扑排序
拓扑序:如果图中从V到W有一条有向路径,则V一定排在W之前。满足次条件的顶点序列称为一个
拓扑序;获得一个
拓扑序的过程就是拓扑排序;AOV如果有合理的拓扑序,则必定是
有向无环图(Directed Acyclic Graph,DAG);